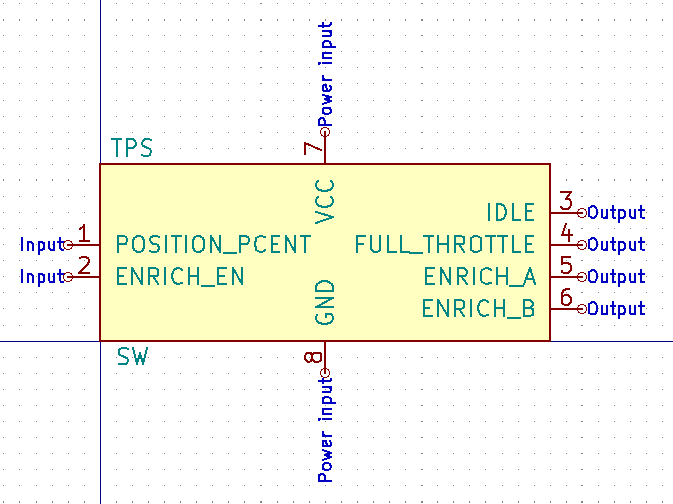
The TPS takes the position of the throttle linkage and generates four outputs:
- Idle signal
- Full throttle signal
- Enrichment A
- Enrichment B
When the throttle is 2% or less then the idle switch is closed causing the voltage on that output to drop to ground.
When the throttle is 90% or more then the full throttle switch is closed causing the voltage on that output to drop to ground.
During acceleration the enrichment A and B outputs produce a series of pulses telling the ECU to add more fuel. When the throttle is released no pulses are generated as the ECU goes into over-run mode (no injection). I determined the throttle positions of the enrichment pulses by scaling and measuring a photograph of the “fingers” on a TPS circuit board.
For the simulation we need to input the throttle position as a percentage from 0% to 100%. We also need to add another input that doesn’t exist on the real TPS but is needed for simulation and that is “enrichment enable”. When enrichment enable is high then changes to the throttle position will cause the enrichment pulses to be generated. When enrichment enable is low the pulses are not generated.
A circuit simulation doesn’t know anything about throttle linkages, mechanical movements, etc. so we will apply a voltage from 0.00V to 1.00V that corresponds to 0% to 100% of throttle. This voltage will be processed to generate the four output signals.
In KiCAD create a new schematic symbol as follows:
Place this onto a circuit with some voltage sources. The simulated TPS is a circuit so it also need a power supply and ground (which the real TPS does not need). Here is my test circuit.

5V is applied to the TPS to power it. This value is the logic high voltage of the output signals and can be set to whatever is needed.
The throttle position is a waveform corresponding to an increase from 0% to 100% and back to 0%.
The enrichment enable is a waveform that correlates with the throttle position so that enrichment is only enabled when the throttle is increasing.
Create a new text file called TPS.lib and copy the contents below into it and then save it.
* D-Jetronic Throttle Position Switch
* Version 1.0, March 2022
.subckt tps position enrich_en idle full_throttle enrich_a enrich_b vcc gnd
.model DIODE D
.model BCY58 npn
.model BSX95 npn
.model AUY21 pnp
XS2 0 Net-_R11-Pad2_ POSITION 0 vcs close_v=0.069
R2 VCC Net-_R11-Pad2_ 1k
Q2 Net-_Q1-Pad3_ Net-_Q2-Pad2_ 0 BCY58
R11 Net-_Q2-Pad2_ Net-_R11-Pad2_ 10k
R10 Net-_Q1-Pad2_ Net-_R1-Pad1_ 10k
Q1 PA_1 Net-_Q1-Pad2_ Net-_Q1-Pad3_ BCY58
R1 Net-_R1-Pad1_ 0 1k
XS1 VCC Net-_R1-Pad1_ POSITION 0 vcs close_v=0.047
R9 VCC Net-_R18-Pad2_ 1k
XS9 0 Net-_R18-Pad2_ POSITION 0 vcs close_v=0.02
Q9 IDLE Net-_Q9-Pad2_ 0 BCY58
R18 Net-_Q9-Pad2_ Net-_R18-Pad2_ 10k
* R23 VCC IDLE 1k
R40 Net-_R40-Pad1_ 0 1k
XS18 VCC Net-_R40-Pad1_ POSITION 0 vcs close_v=0.9
Q18 FULL_THROTTLE Net-_Q18-Pad2_ 0 BCY58
R45 Net-_Q18-Pad2_ Net-_R40-Pad1_ 10k
* R46 VCC FULL_THROTTLE 1k
R19 VCC PA_1 1k
XS11 0 Net-_R25-Pad2_ POSITION 0 vcs close_v=0.162
R25 VCC Net-_R25-Pad2_ 1k
Q11 Net-_Q10-Pad3_ Net-_Q11-Pad2_ 0 BCY58
R33 Net-_Q11-Pad2_ Net-_R25-Pad2_ 10k
R32 Net-_Q10-Pad2_ Net-_R24-Pad1_ 10k
Q10 PA_2 Net-_Q10-Pad2_ Net-_Q10-Pad3_ BCY58
R24 Net-_R24-Pad1_ 0 1k
XS10 VCC Net-_R24-Pad1_ POSITION 0 vcs close_v=0.139
R41 VCC PA_2 1k
XS20 0 Net-_R48-Pad2_ POSITION 0 vcs close_v=0.254
R48 VCC Net-_R48-Pad2_ 1k
Q20 Net-_Q19-Pad3_ Net-_Q20-Pad2_ 0 BCY58
R56 Net-_Q20-Pad2_ Net-_R48-Pad2_ 10k
R55 Net-_Q19-Pad2_ Net-_R47-Pad1_ 10k
Q19 PA_3 Net-_Q19-Pad2_ Net-_Q19-Pad3_ BCY58
R47 Net-_R47-Pad1_ 0 1k
XS19 VCC Net-_R47-Pad1_ POSITION 0 vcs close_v=0.232
R63 VCC PA_3 1k
XS28 0 Net-_R68-Pad2_ POSITION 0 vcs close_v=0.346
R68 VCC Net-_R68-Pad2_ 1k
Q28 Net-_Q27-Pad3_ Net-_Q28-Pad2_ 0 BCY58
R76 Net-_Q28-Pad2_ Net-_R68-Pad2_ 10k
R75 Net-_Q27-Pad2_ Net-_R67-Pad1_ 10k
Q27 PA_4 Net-_Q27-Pad2_ Net-_Q27-Pad3_ BCY58
R67 Net-_R67-Pad1_ 0 1k
XS27 VCC Net-_R67-Pad1_ POSITION 0 vcs close_v=0.324
R83 VCC PA_4 1k
XS36 0 Net-_R88-Pad2_ POSITION 0 vcs close_v=0.438
R88 VCC Net-_R88-Pad2_ 1k
Q36 Net-_Q35-Pad3_ Net-_Q36-Pad2_ 0 BCY58
R96 Net-_Q36-Pad2_ Net-_R88-Pad2_ 10k
R95 Net-_Q35-Pad2_ Net-_R87-Pad1_ 10k
Q35 PA_5 Net-_Q35-Pad2_ Net-_Q35-Pad3_ BCY58
R87 Net-_R87-Pad1_ 0 1k
XS35 VCC Net-_R87-Pad1_ POSITION 0 vcs close_v=0.416
R103 VCC PA_5 1k
XS4 0 Net-_R13-Pad2_ POSITION 0 vcs close_v=0.531
R4 VCC Net-_R13-Pad2_ 1k
Q4 Net-_Q3-Pad3_ Net-_Q4-Pad2_ 0 BCY58
R13 Net-_Q4-Pad2_ Net-_R13-Pad2_ 10k
R12 Net-_Q3-Pad2_ Net-_R12-Pad2_ 10k
Q3 PA_6 Net-_Q3-Pad2_ Net-_Q3-Pad3_ BCY58
R3 Net-_R12-Pad2_ 0 1k
XS3 VCC Net-_R12-Pad2_ POSITION 0 vcs close_v=0.509
R20 VCC PA_6 1k
XS13 0 Net-_R27-Pad2_ POSITION 0 vcs close_v=0.623
R27 VCC Net-_R27-Pad2_ 1k
Q13 Net-_Q12-Pad3_ Net-_Q13-Pad2_ 0 BCY58
R35 Net-_Q13-Pad2_ Net-_R27-Pad2_ 10k
R34 Net-_Q12-Pad2_ Net-_R26-Pad1_ 10k
Q12 PA_7 Net-_Q12-Pad2_ Net-_Q12-Pad3_ BCY58
R26 Net-_R26-Pad1_ 0 1k
XS12 VCC Net-_R26-Pad1_ POSITION 0 vcs close_v=0.601
R42 VCC PA_7 1k
XS22 0 Net-_R50-Pad2_ POSITION 0 vcs close_v=0.715
R50 VCC Net-_R50-Pad2_ 1k
Q22 Net-_Q21-Pad3_ Net-_Q22-Pad2_ 0 BCY58
R58 Net-_Q22-Pad2_ Net-_R50-Pad2_ 10k
R57 Net-_Q21-Pad2_ Net-_R49-Pad1_ 10k
Q21 PA_8 Net-_Q21-Pad2_ Net-_Q21-Pad3_ BCY58
R49 Net-_R49-Pad1_ 0 1k
XS21 VCC Net-_R49-Pad1_ POSITION 0 vcs close_v=0.693
R64 VCC PA_8 1k
XS30 0 Net-_R70-Pad2_ POSITION 0 vcs close_v=0.808
R70 VCC Net-_R70-Pad2_ 1k
Q30 Net-_Q29-Pad3_ Net-_Q30-Pad2_ 0 BCY58
R78 Net-_Q30-Pad2_ Net-_R70-Pad2_ 10k
R77 Net-_Q29-Pad2_ Net-_R69-Pad1_ 10k
Q29 PA_9 Net-_Q29-Pad2_ Net-_Q29-Pad3_ BCY58
R69 Net-_R69-Pad1_ 0 1k
XS29 VCC Net-_R69-Pad1_ POSITION 0 vcs close_v=0.786
R84 VCC PA_9 1k
XS38 0 Net-_R90-Pad2_ POSITION 0 vcs close_v=1.00
R90 VCC Net-_R90-Pad2_ 1k
Q38 Net-_Q37-Pad3_ Net-_Q38-Pad2_ 0 BCY58
R98 Net-_Q38-Pad2_ Net-_R90-Pad2_ 10k
R97 Net-_Q37-Pad2_ Net-_R89-Pad1_ 10k
Q37 PA_10 Net-_Q37-Pad2_ Net-_Q37-Pad3_ BCY58
R89 Net-_R89-Pad1_ 0 1k
XS37 VCC Net-_R89-Pad1_ POSITION 0 vcs close_v=0.878
R104 VCC PA_10 1k
Q54 Net-_Q54-Pad1_ PA_1 Net-_Q54-Pad3_ BCY58
Q55 Net-_Q54-Pad3_ PA_2 Net-_Q55-Pad3_ BCY58
Q56 Net-_Q55-Pad3_ PA_3 Net-_Q56-Pad3_ BCY58
Q57 Net-_Q56-Pad3_ PA_4 Net-_Q57-Pad3_ BCY58
Q58 Net-_Q57-Pad3_ PA_5 Net-_Q58-Pad3_ BCY58
Q59 Net-_Q58-Pad3_ PA_6 Net-_Q59-Pad3_ BCY58
Q60 Net-_Q59-Pad3_ PA_7 Net-_Q60-Pad3_ BCY58
Q61 Net-_Q60-Pad3_ PA_8 Net-_Q61-Pad3_ BCY58
Q62 Net-_Q61-Pad3_ PA_9 Net-_Q62-Pad3_ BCY58
Q63 Net-_Q62-Pad3_ PA_10 0 BCY58
XS6 0 Net-_R15-Pad2_ POSITION 0 vcs close_v=0.023
R6 VCC Net-_R15-Pad2_ 1k
Q6 Net-_Q5-Pad3_ Net-_Q6-Pad2_ 0 BCY58
R15 Net-_Q6-Pad2_ Net-_R15-Pad2_ 10k
R14 Net-_Q5-Pad2_ Net-_R14-Pad2_ 10k
Q5 PB_1 Net-_Q5-Pad2_ Net-_Q5-Pad3_ BCY58
R5 Net-_R14-Pad2_ 0 1k
XS5 VCC Net-_R14-Pad2_ POSITION 0 vcs close_v=0.0
R21 VCC PB_1 1k
XS15 0 Net-_R29-Pad2_ POSITION 0 vcs close_v=0.115
R29 VCC Net-_R29-Pad2_ 1k
Q15 Net-_Q14-Pad3_ Net-_Q15-Pad2_ 0 BCY58
R37 Net-_Q15-Pad2_ Net-_R29-Pad2_ 10k
R36 Net-_Q14-Pad2_ Net-_R28-Pad1_ 10k
Q14 PB_2 Net-_Q14-Pad2_ Net-_Q14-Pad3_ BCY58
R28 Net-_R28-Pad1_ 0 1k
XS14 VCC Net-_R28-Pad1_ POSITION 0 vcs close_v=0.093
R43 VCC PB_2 1k
XS24 0 Net-_R52-Pad2_ POSITION 0 vcs close_v=0.208
R52 VCC Net-_R52-Pad2_ 1k
Q24 Net-_Q23-Pad3_ Net-_Q24-Pad2_ 0 BCY58
R60 Net-_Q24-Pad2_ Net-_R52-Pad2_ 10k
R59 Net-_Q23-Pad2_ Net-_R51-Pad1_ 10k
Q23 PB_3 Net-_Q23-Pad2_ Net-_Q23-Pad3_ BCY58
R51 Net-_R51-Pad1_ 0 1k
XS23 VCC Net-_R51-Pad1_ POSITION 0 vcs close_v=0.186
R65 VCC PB_3 1k
XS32 0 Net-_R72-Pad2_ POSITION 0 vcs close_v=0.300
R72 VCC Net-_R72-Pad2_ 1k
Q32 Net-_Q31-Pad3_ Net-_Q32-Pad2_ 0 BCY58
R80 Net-_Q32-Pad2_ Net-_R72-Pad2_ 10k
R79 Net-_Q31-Pad2_ Net-_R71-Pad1_ 10k
Q31 PB_4 Net-_Q31-Pad2_ Net-_Q31-Pad3_ BCY58
R71 Net-_R71-Pad1_ 0 1k
XS31 VCC Net-_R71-Pad1_ POSITION 0 vcs close_v=0.256
R85 VCC PB_4 1k
XS40 0 Net-_R100-Pad2_ POSITION 0 vcs close_v=0.392
R92 VCC Net-_R100-Pad2_ 1k
Q40 Net-_Q39-Pad3_ Net-_Q40-Pad2_ 0 BCY58
R100 Net-_Q40-Pad2_ Net-_R100-Pad2_ 10k
R99 Net-_Q39-Pad2_ Net-_R91-Pad1_ 10k
Q39 PB_5 Net-_Q39-Pad2_ Net-_Q39-Pad3_ BCY58
R91 Net-_R91-Pad1_ 0 1k
XS39 VCC Net-_R91-Pad1_ POSITION 0 vcs close_v=0.370
R105 VCC PB_5 1k
XS8 0 Net-_R17-Pad2_ POSITION 0 vcs close_v=0.485
R8 VCC Net-_R17-Pad2_ 1k
Q8 Net-_Q7-Pad3_ Net-_Q8-Pad2_ 0 BCY58
R17 Net-_Q8-Pad2_ Net-_R17-Pad2_ 10k
R16 Net-_Q7-Pad2_ Net-_R16-Pad2_ 10k
Q7 PB_6 Net-_Q7-Pad2_ Net-_Q7-Pad3_ BCY58
R7 Net-_R16-Pad2_ 0 1k
XS7 VCC Net-_R16-Pad2_ POSITION 0 vcs close_v=0.463
R22 VCC PB_6 1k
R31 VCC Net-_R31-Pad2_ 1k
Q17 Net-_Q16-Pad3_ Net-_Q17-Pad2_ 0 BCY58
R39 Net-_Q17-Pad2_ Net-_R31-Pad2_ 10k
R38 Net-_Q16-Pad2_ Net-_R30-Pad1_ 10k
Q16 PB_7 Net-_Q16-Pad2_ Net-_Q16-Pad3_ BCY58
R30 Net-_R30-Pad1_ 0 1k
XS16 VCC Net-_R30-Pad1_ POSITION 0 vcs close_v=0.555
R44 VCC PB_7 1k
R54 VCC Net-_R54-Pad2_ 1k
Q26 Net-_Q25-Pad3_ Net-_Q26-Pad2_ 0 BCY58
R62 Net-_Q26-Pad2_ Net-_R54-Pad2_ 10k
R61 Net-_Q25-Pad2_ Net-_R53-Pad1_ 10k
Q25 PB_8 Net-_Q25-Pad2_ Net-_Q25-Pad3_ BCY58
R53 Net-_R53-Pad1_ 0 1k
R66 VCC PB_8 1k
XS34 0 Net-_R74-Pad2_ POSITION 0 vcs close_v=0.762
R74 VCC Net-_R74-Pad2_ 1k
Q34 Net-_Q33-Pad3_ Net-_Q34-Pad2_ 0 BCY58
R82 Net-_Q34-Pad2_ Net-_R74-Pad2_ 10k
R81 Net-_Q33-Pad2_ Net-_R73-Pad1_ 10k
Q33 PB_9 Net-_Q33-Pad2_ Net-_Q33-Pad3_ BCY58
R73 Net-_R73-Pad1_ 0 1k
XS33 VCC Net-_R73-Pad1_ POSITION 0 vcs close_v=0.739
R86 VCC PB_9 1k
XS42 0 Net-_R102-Pad2_ POSITION 0 vcs close_v=0.854
R94 VCC Net-_R102-Pad2_ 1k
Q42 Net-_Q41-Pad3_ Net-_Q42-Pad2_ 0 BCY58
R102 Net-_Q42-Pad2_ Net-_R102-Pad2_ 10k
R101 Net-_Q41-Pad2_ Net-_R101-Pad2_ 10k
Q41 PB_10 Net-_Q41-Pad2_ Net-_Q41-Pad3_ BCY58
R93 Net-_R101-Pad2_ 0 1k
XS41 VCC Net-_R101-Pad2_ POSITION 0 vcs close_v=0.832
R106 VCC PB_10 1k
XS26 0 Net-_R54-Pad2_ POSITION 0 vcs close_v=0.669
XS17 0 Net-_R31-Pad2_ POSITION 0 vcs close_v=0.577
XS25 VCC Net-_R53-Pad1_ POSITION 0 vcs close_v=0.647
R108 VCC Net-_Q44-Pad1_ 1k
Q53 Net-_Q52-Pad3_ PB_10 0 BCY58
Q52 Net-_Q51-Pad3_ PB_9 Net-_Q52-Pad3_ BCY58
Q51 Net-_Q50-Pad3_ PB_8 Net-_Q51-Pad3_ BCY58
Q50 Net-_Q49-Pad3_ PB_7 Net-_Q50-Pad3_ BCY58
Q49 Net-_Q48-Pad3_ PB_6 Net-_Q49-Pad3_ BCY58
Q48 Net-_Q47-Pad3_ PB_5 Net-_Q48-Pad3_ BCY58
Q47 Net-_Q46-Pad3_ PB_4 Net-_Q47-Pad3_ BCY58
Q46 Net-_Q45-Pad3_ PB_3 Net-_Q46-Pad3_ BCY58
Q45 Net-_Q44-Pad3_ PB_2 Net-_Q45-Pad3_ BCY58
Q44 Net-_Q44-Pad1_ PB_1 Net-_Q44-Pad3_ BCY58
Q67 VCC Net-_Q67-Pad2_ Net-_Q65-Pad3_ BCY58
Q65 VCC N_ENRICH_EN Net-_Q65-Pad3_ BCY58
Q43 N_ENRICH_EN ENRICH_EN 0 BCY58
R107 VCC N_ENRICH_EN 1k
R109 VCC Net-_Q54-Pad1_ 1k
R113 Net-_Q65-Pad3_ 0 1k
R117 VCC Net-_Q69-Pad1_ 1k
Q69 Net-_Q69-Pad1_ Net-_Q69-Pad2_ 0 BCY58
* R121 VCC ENRICH_A 1k
Q71 ENRICH_A Net-_Q71-Pad2_ 0 BCY58
R115 Net-_Q69-Pad2_ Net-_Q65-Pad3_ 1k
R119 Net-_Q71-Pad2_ Net-_Q69-Pad1_ 1k
R111 Net-_Q67-Pad2_ Net-_Q54-Pad1_ 1k
Q66 VCC Net-_Q66-Pad2_ Net-_Q64-Pad3_ BCY58
Q64 VCC N_ENRICH_EN Net-_Q64-Pad3_ BCY58
R112 Net-_Q64-Pad3_ 0 1k
R116 VCC Net-_Q68-Pad1_ 1k
Q68 Net-_Q68-Pad1_ Net-_Q68-Pad2_ 0 BCY58
* R120 VCC ENRICH_B 1k
Q70 ENRICH_B Net-_Q70-Pad2_ 0 BCY58
R114 Net-_Q68-Pad2_ Net-_Q64-Pad3_ 1k
R118 Net-_Q70-Pad2_ Net-_Q68-Pad1_ 1k
R110 Net-_Q66-Pad2_ Net-_Q44-Pad1_ 1k
.ends
.subckt vcs in_pin out_pin vcc_pin gnd_pin close_v=5.0
.model vcs_switch sw vt={close_v} vh=0.01 ron=1 roff=1Meg
S1 in_pin out_pin vcc_pin gnd_pin vcs_switch
.endsEdit the TPS component and click on Edit Spice Model.

In the Edit Spice Model dialog select TPS.lib.

Click on OK then OK.
Here is the result of running the simulation.

he green waveform is the throttle going from 0% (0.00V) to 100% (1.00V) and back to 0% again.
The red waveform is the idle signal, only low when the throttle is 2% or less.
The blue waveform is the full throttle signal, only low when the throttle is 90% or more.
The yellow and pink waveforms are the alternating enrichment pulses, only during acceleration.
Here are the same waveforms but “stacked” – translated vertically so that the relationships can be seen. The voltage on the Y-axis only corresponds to the green waveform.

Comments are closed